















 37 / 60
37 / 60

WP4 – PILOTAGE DE LA TRAJECTOIRE / DE L’ATTITUDE
Contrôle de la trajectoire
(WP4 – Pilotage de la trajectoire / de l’attitude)
Emmanuelle DODANE - Benjamin LAMBERT - Vincent VACHER - Florian ROUSSEAU
ART ET METIERS PARISTECH, CHALONS-EN-CHAMPAGNE
Les évolutions dans le domaine de
l’aérospatial durant le vingtième siècle ont
rendu le vol spatial habité réalisable. Le
tourisme spatial est maintenant un marché
en maturation. Toutefois, les contraintes
tant sur le plan physiologique que sur le
matériel pour ce type de vol restent
sévères.
Dans ce contexte, disposer d’actionneurs
ouvrant au maximum le domaine de vol du
véhicule est fondamental.
Nos travaux portent donc, dans un premier
temps, sur un état des actionneurs
disponibles selon les phases de vol. Nous
proposons ensuite nos travaux sur une
technologie innovante à utiliser pour la
phase de microgravité.
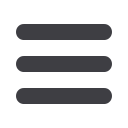
Notre actionneur innovant est composé
d’une buse de sortie de gaz placé sur une
demi-sphère. La sortie de la buse est
située à un angle θ
0
de l’axe de rotation
principale de la demi-sphère (axe z). En
fonction de l’angle de rotation 2φ autour de
l’axe z, nous obtenons une force résultante
(vecteur bleu sur la figue) avec une
inclinaison θ réglable située entre 0 et θ
0
.
Le module de cette force résultante est
fonction du degré de balayage et du
module de la force de poussée initiale
présente sur la buse. Pour faire varier
in
fine
le module de la force résultante, il
convient ensuite de réaliser plus ou moins
longtemps le cycle de rotation 2φ. Lors de
cette étude nous calculons les lois de
commande analytiques, ainsi que les
différentes implantations possibles.
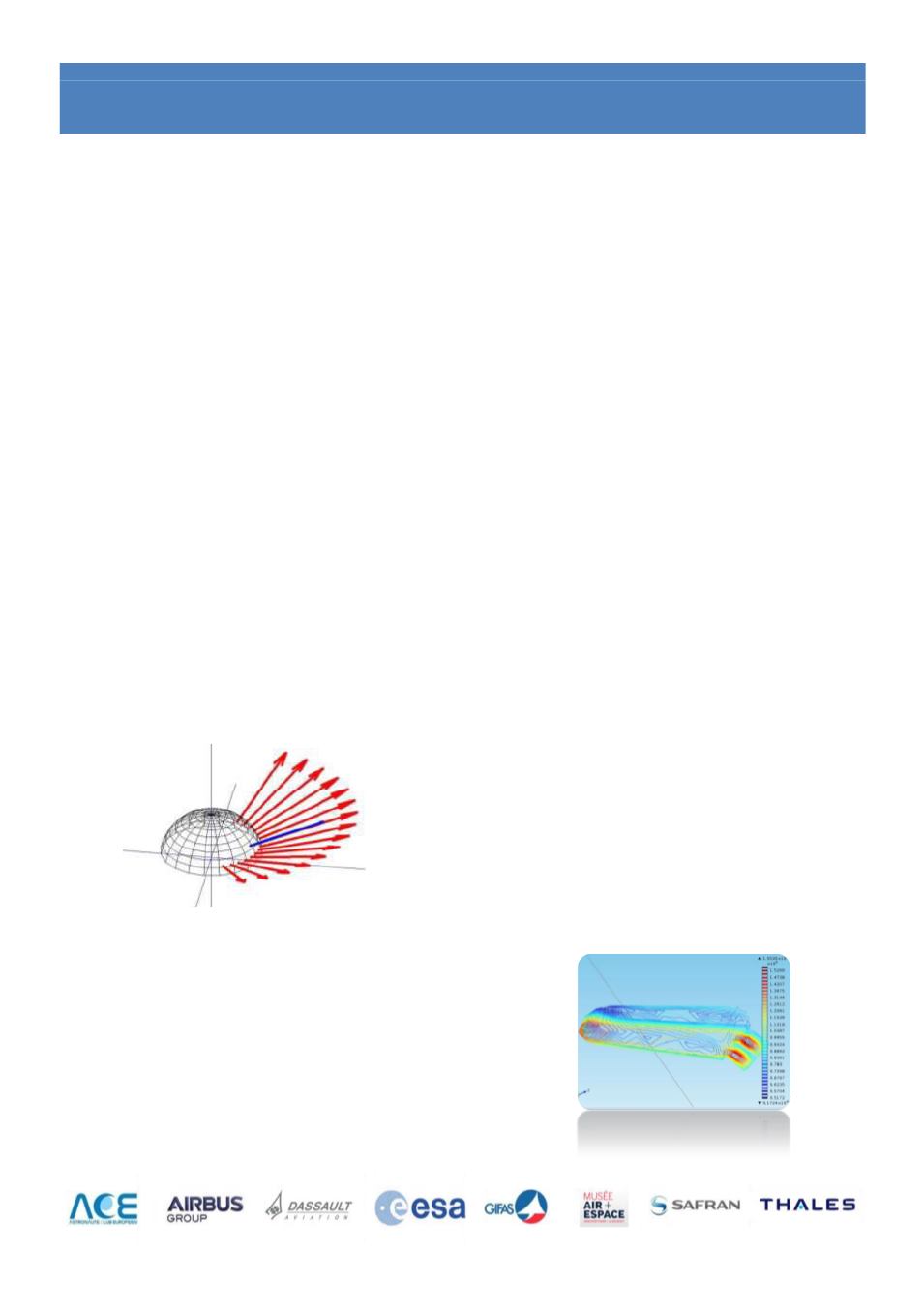
Pour pouvoir améliorer et affiner nos choix
technologiques, nous cherchons ensuite à
définir les efforts appliqués sur notre
navette. Pour cela des études sont
réalisées
et
présentées
sur
les
programmes
de
CFD
(problèmes
d’écoulement fluide), les méthodes de
résolutions actuelles des équations de
Navier-Stokes ainsi que les approches
mathématiques sur le comportement de la
turbulence (k-l, k-ε, k-ω). Ces éléments
permettent de mettre en place et simuler
des modèles numériques du véhicule. Nos
travaux permettent, avec une approche
simple qui reste à affiner, de conclure sur
les zones de concentrations d’effort.