















 38 / 60
38 / 60

WP4 – TRAJECTORY AND ATTITUDE CONTROL SYSTEMS
Directional control
(WP4 – Trajectory and Attitude control systems)
Emmanuelle DODANE - Benjamin LAMBERT - Vincent VACHER - Florian ROUSSEAU
ART ET METIERS PARISTECH, CHALONS-EN-CHAMPAGNE
Developments in the field of aerospace
during the twentieth century made the
manned space flight feasible. Space
tourism is now a maturing market.
However, constraints as physiological and
the material for this type of flight remain
severe.
In this context, actuators which a open as
maximum as possible the flight envelope of
the vehicle are essential.
Our work may bear initially on state
actuators available according to flight
phases. Our work on innovative
technologies used in the microgravity
phase is presented in this article.
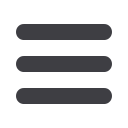
Our innovative actuator is composed of a
gas outlet nozzle arranged on a
hemisphere. The outlet of the nozzle is
located at an angle θ
0
of the main axis of
rotation of the half-sphere. Depending on
the rotational angle 2φ around the z axis,
we obtain a resultant force (blue vector on
the fig) with an adjustable inclination θ
between 0 and θ
0
. The module of this
resultant force is a function of the degree of
sweep and the module of the initial pushing
force present on the nozzle. To vary the
modulus of the resultant force, the next
step is to achieve more or less time 2φ the
rotation cycle. In this study we calculate the
analytical control laws, as well as the
different possible locations.
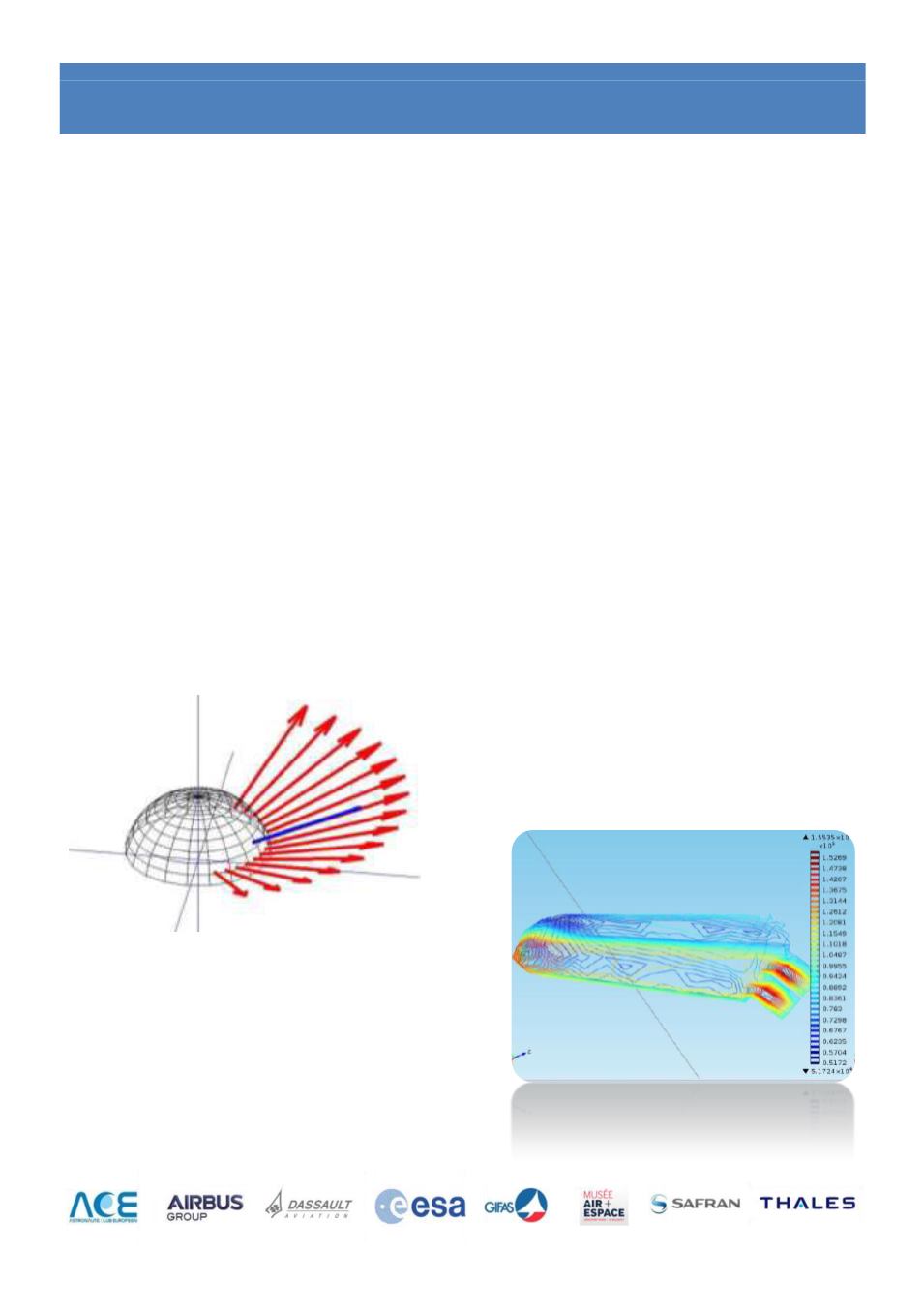
In order to improve and refine our
technological choices, we seek to define
the forces applied to our shuttle. For these
studies we used and presented programs
on CFD (fluid flow problems), methods of
current resolutions of the Navier-Stokes
equations and mathematical approaches of
the behavior of turbulences (k, k-ε, k-ω).
These elements allow implementing and
simulating digital models of the vehicle.
Our work allows us, with a simple approach
that remains to refine, to determine areas
of stress concentrations.